Environmental Monitoring and Industrial Measurement

Environmental Monitoring and Industrial Measurement
Technical White Paper
Printer-Friendly Version
Water depth sensors report the water level above the sensor measuring element. Some applications specify that this value is converted into a measurement of depth to water (D2W). D2W is measured from a datum (such as the top of the borehole casing) to the water level
Two initial readings are required to use the D2W calculation method:
To maximize the accuracy of the initial reading, it is recommended for the sensor to be allowed to stabilize to the water temperature for an hour or so if it is coming from a much hotter or colder surrounding temperature compared to the water temperature to minimize any temperature effects.
The Scheme test mode of Starlog V4 software can be used to obtain the initial water level reading from the level sensor. This value will update every logger scan
This is usually performed with a dipping tape measure. This is a measurement from the datum you choose to the water level surface. The datum may be the top of the borehole casing, or another datum, e.g. Australian Height Datum
Depth to water is calculated as:
D2W = (initial depth sensor reading at installation) – (current depth sensor reading) + manual depth to water reading (at installation)
A derived channel can be used in the Neon software to automatically convert the reported water level value into a Depth to Water value
1. On the Neon node, under the Data Channels Tab, click on Add Derived Channel
2. Enter a name for the new channel such as D2W
3. Select Sensor 1 as the water depth sensor
4. Enter units
5. Enter the formula in the formula box as:
(Initial water level reading from the sensor at installation (step 1 above)) –x + (manual reading of depth to water at installation (step 2 above))
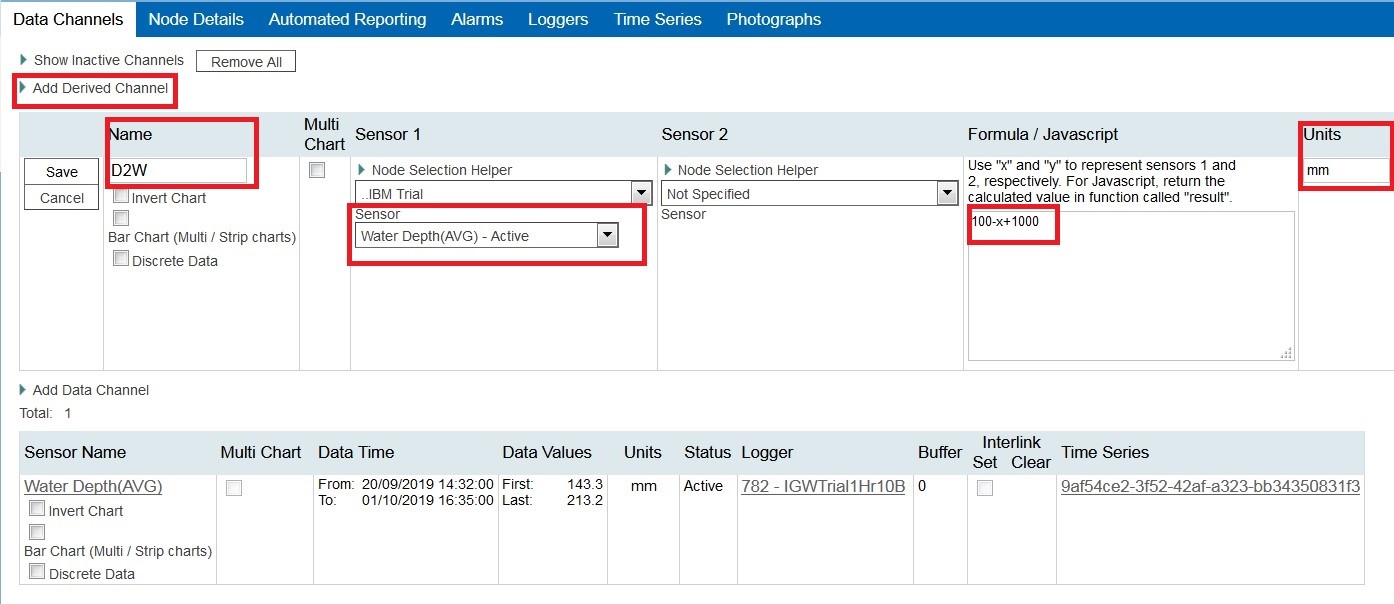
In the example above, the initial sensor depth reading at installation is 100mm, and the manual reading of depth to water at installation is 1000mm, so the formula becomes
100 – x + 1000
If the next reported depth sensor value was 200mm, the calculated D2W would be:
100 – 200 + 1000 = 900mm